引力波的探测与数据分析
探测器对引力波的响应
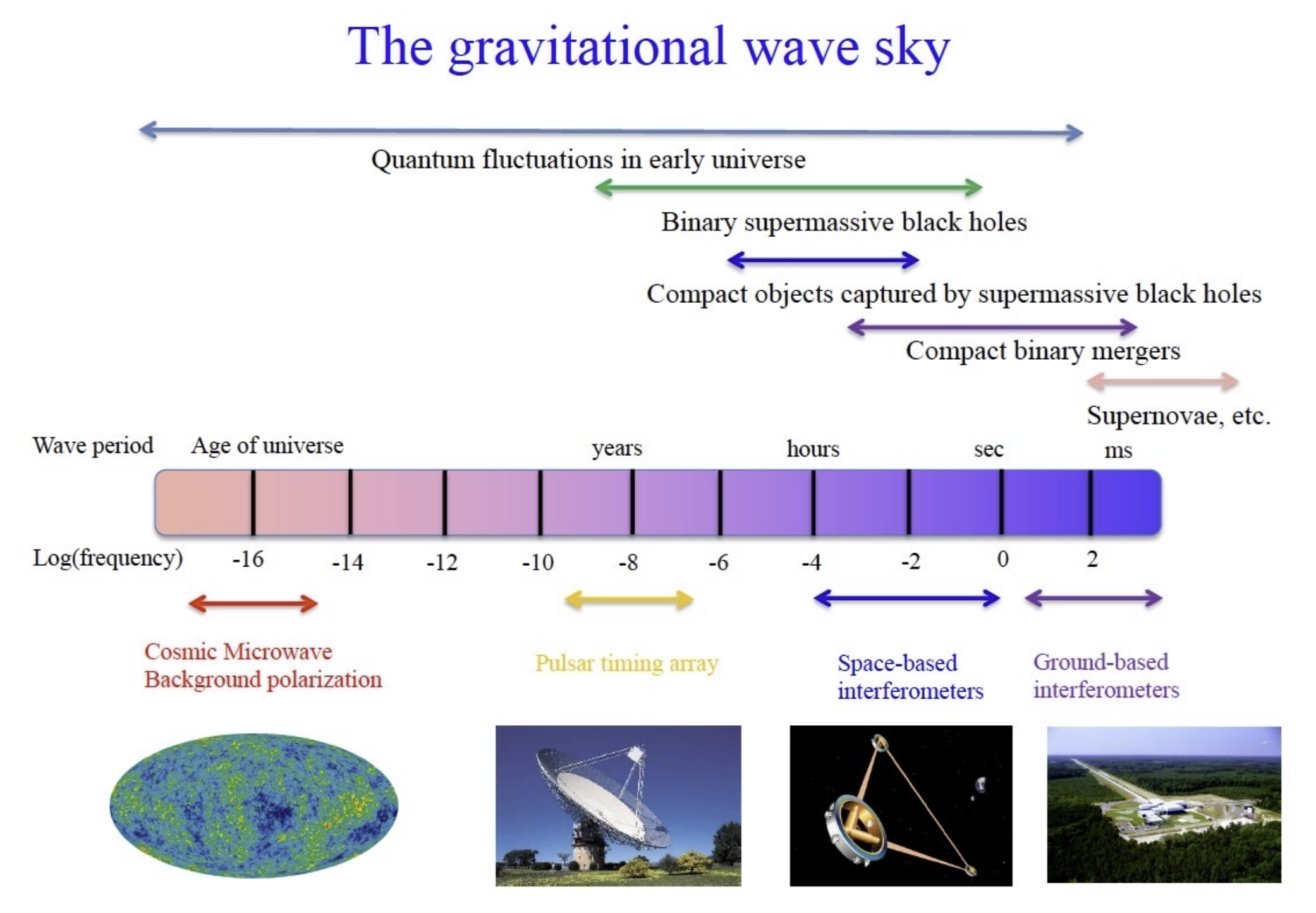 (图示:展示了不同频率的引力波源,从量子涨落到双黑洞并合)
(图示:展示了不同频率的引力波源,从量子涨落到双黑洞并合) 目前人们主要关注的引力波集中在四个频率区间,而对应的探测手段也各有不同。
- 在
Hz:来自宇宙早期的引力波会改变宇宙微波背景(CMB)辐射的极化。所以通过测量 CMB 的极化能够探寻原初引力波的存在。 - 在
Hz:人们通过测量银河系内的脉冲星对地球射来的射电脉冲的到达时间来测量它们传播途中所受引力波的影响。近年来有越来越多迹象表明我们可能已经接近探测到这一频段的引力波,之后我们会专门讨论脉冲星阵列(PTA)的引力波探测。 - 在
Hz:人们将于 2030s 发射绕太阳(USA, LISA, 太极)或者绕地球(天琴)的卫星编队。通过测量卫星之间的激光通信时间,从而探测来自额外双超大质量黑洞,极端质量比旋进,银河系双白矮星等源的引力波。 - 在
Hz:LIGO/Virgo 的探测(恒星质量双黑洞,中子星等)取得了极大的成功。在下个十年人们将建造第三代探测器,比如欧洲的 Einstein Telescope 和美国的 Cosmic Explorer。中国也有可能建造专注千赫兹的 ( ) 探测器,从而与国外的探测器实现频率空间互补。
接下来我们来讨论最熟悉的情况,地面探测器的基本工作原理。我们将采取两种不一样的方法,一种引力波作用于镜子,一种引力波作用于光。两种观点最后导致一样的结果。
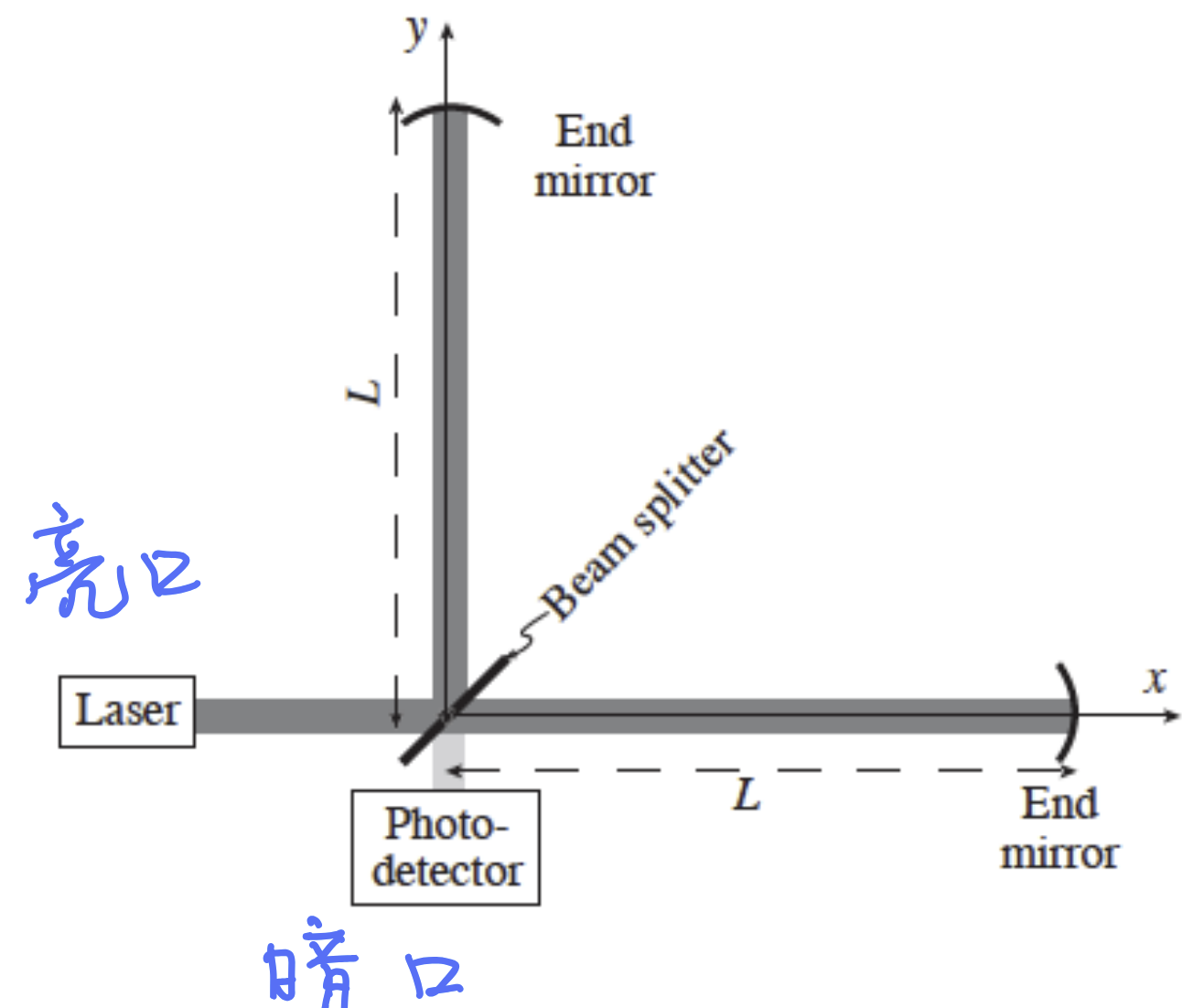
引力波作用于光
接下来我们首先在 TT 规范下考虑干涉仪的响应。我们把干涉仪的双臂分别放在
简化起见我们省略下标 "+"。我们把分光镜 (Beam Splitter) 和后端镜 (End Mirror) 看作自由悬浮的物体,那么引力波来后,它们应该走测地线。另外,由于上述度规与
因此这些镜子的坐标都不变。当然,对于给定的
当
由于臂长远小于波长,我们近似认为传播一个来回时
而从
同理对于向
如果光的频率是
而此相位差会导致在暗口 (dark port) 两束光不再是完美相消,由此我们在 dark port 会观察到与 h 成正比的信号。
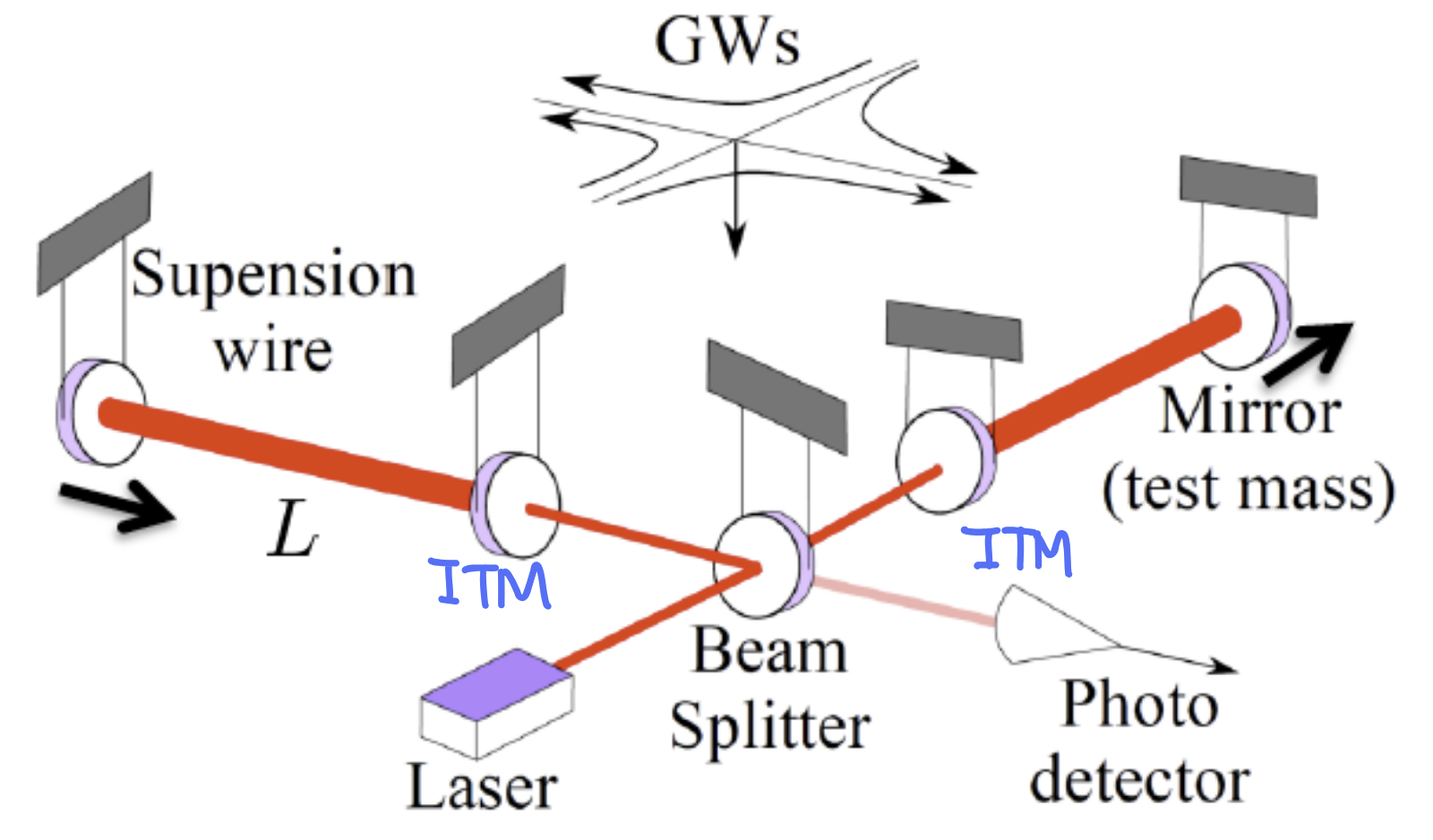
引力波作用于镜子
接下来我们讨论第二种观点。我们可以选取原点放在分光镜的局部惯性系
从而得到
虽然这个表达式是从 TT 规范变换而来,但可以证明它不仅在原点附近满足真空爱因斯坦方程:它自己就是一个严格解。在此参考系内的镜子的运动方程(通过计算
因此光从
与之前在 TT 规范得到的一致。
在 TT 规范中(镜子不动光传播变化)和局部惯性系中(镜子受引力波影响光传播不变)我们对镜子和光的描述有所不同,某种程度类似于量子力学中薛定谔图象与海森堡图象。不管是用哪一种描述,最后的被测量量,暗口的相位差,总是一致的。对于实际的干涉仪,人们在每个臂还添加了额外的镜子使之成为 Fabry-Perot 光腔,这样每个臂的光强能得到提升,以增加灵敏度。
探测器数据分析
接下来我们将讨论怎么从引力波探测器的数据中提取有用的信号,并进行分析。我们将集中讨论地面探测器的情况。为此我们先进行统计与随机过程的一些知识准备,以便之后的应用。
随机过程
考虑一个一维函数
随机过程的系综能被一个概率分布描述
这个函数告诉我们此随机过程在
是
则是
代表已知
这个公式与条件概率公式
稳态随机过程
当
当
注意此稳态性质并不意味着概率密度本身与时间无关。比如考虑一个分子的随机运动,如果已知在
马尔可夫过程
一个随机过程在其下一个时刻的演化只和当前时刻的状态相关时
被称为一个马尔可夫过程。由于下一个时刻的演化只和前一个时刻的值有关,因此此过程系综完全由
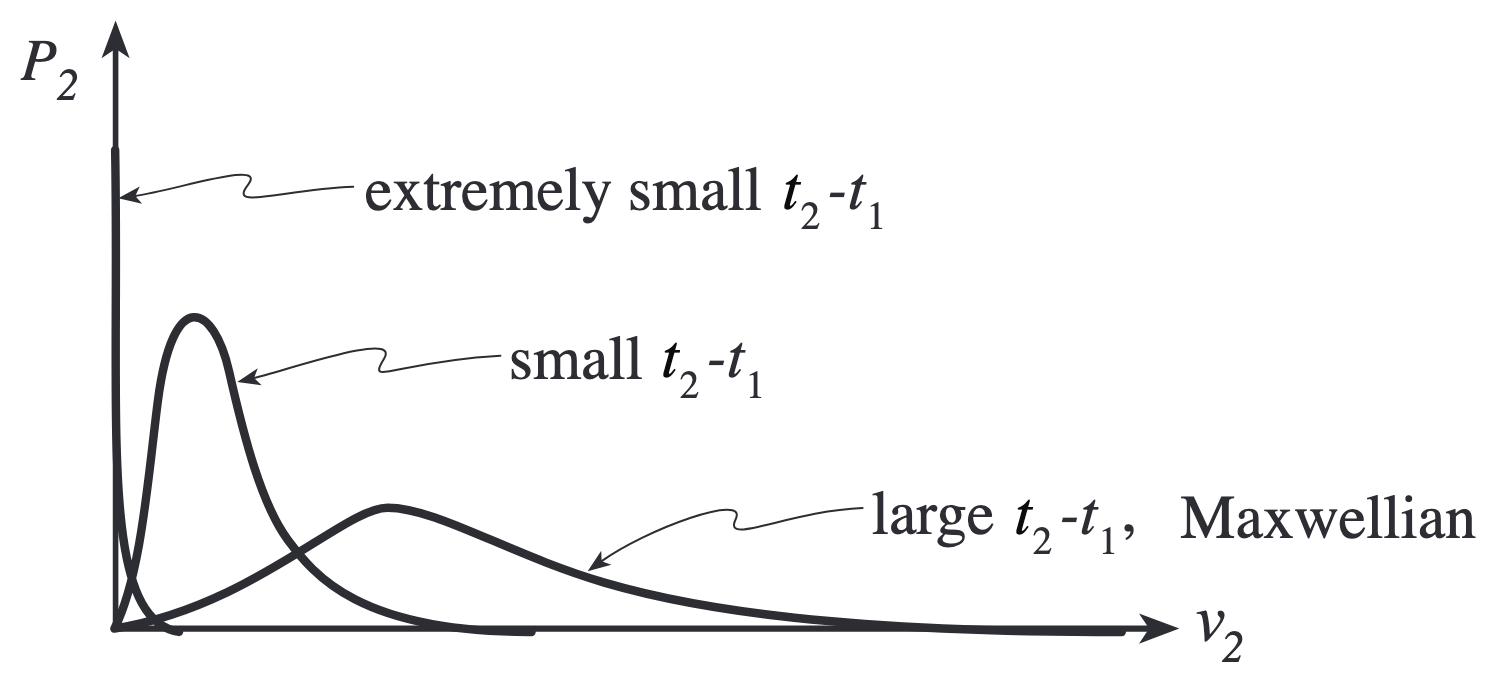
比如说,在空气中运动的一个尘埃粒子的速度分量
高斯过程
当一个随机过程的概率分布都是高斯型时,比如
时,它被称为一个高斯过程。这里
和 都只和 等时间差有关。 是一个正的归一化常数。 是一个正定矩阵。 是一个常数:可以证明
高斯分布和高斯随机过程在物理系统中十分常见。比如,处于热平衡的房间里某一快空间内的气体分子数
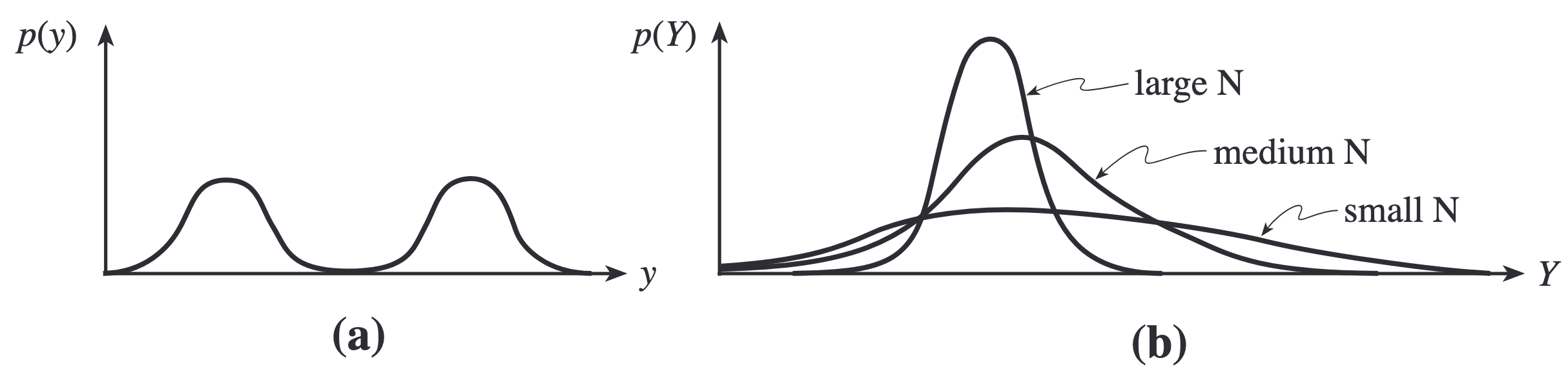
假设
是一个随机变量,其概率分布是 ,因此平均值和标准差分别是 那么如果有
个类似的随机变量 ,它们的平均值(在 很大时) 将满足一个均值为 ,标准差 的高斯分布
我们可以看到不管之前单一随机变量
相关函数
对于一个随机过程,我们有时候用时间平均
而如果
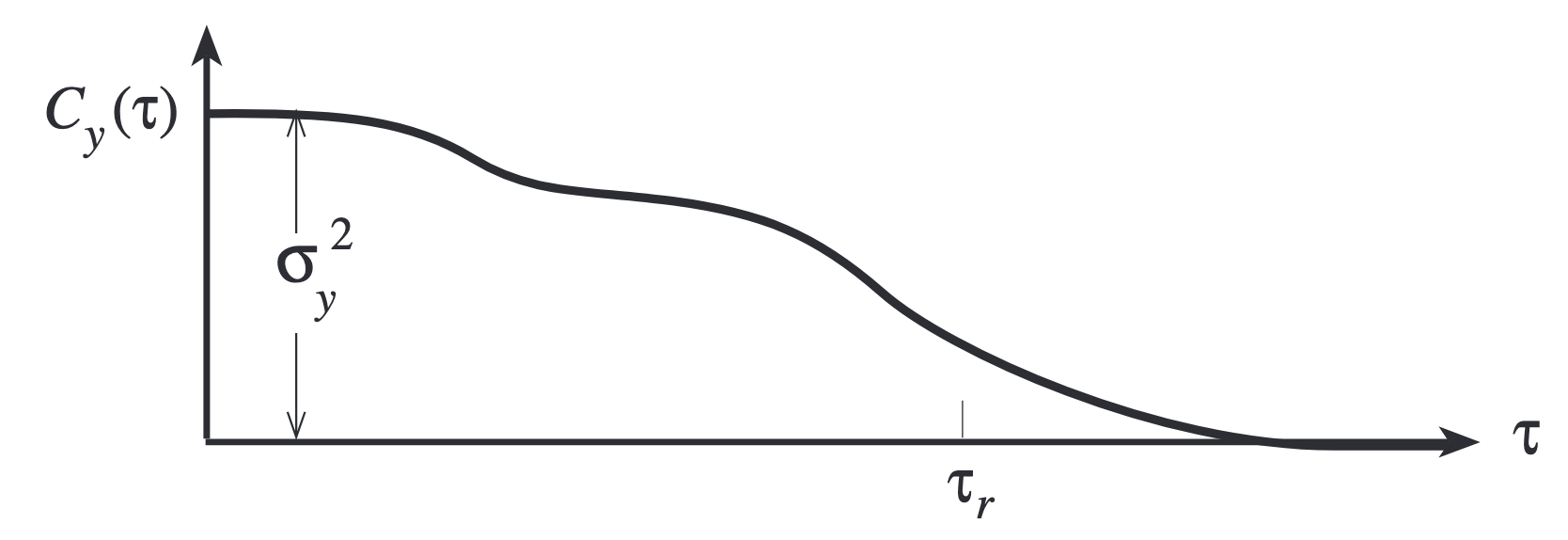
这个函数描述了
而如果同时有两个随机过程
有时
而且
很明显这种相关矩阵能够被推广到更多随机过程的情况下。
傅立叶变换和谱密度
这两个概念对引力波数据分析至关重要。其中傅立叶变换
我们在讨论黑洞与中子星的波型时已经见到过。其反变换为
一个函数经过一个正变换和一个反变换又能回到自身。而在实际情况中,测到的数据长度不可能是无限的。因此我们需要在时间上作某种截断。定义
这样
其中最后一个等式用到了
由此我们可以考虑定义谱密度函数
绝对值之内的表达式就是
因此把不同频率谱密度加到一起就是
这只是一个 Convention 的问题。但若是用双边谱密度那么负频率也得考虑。
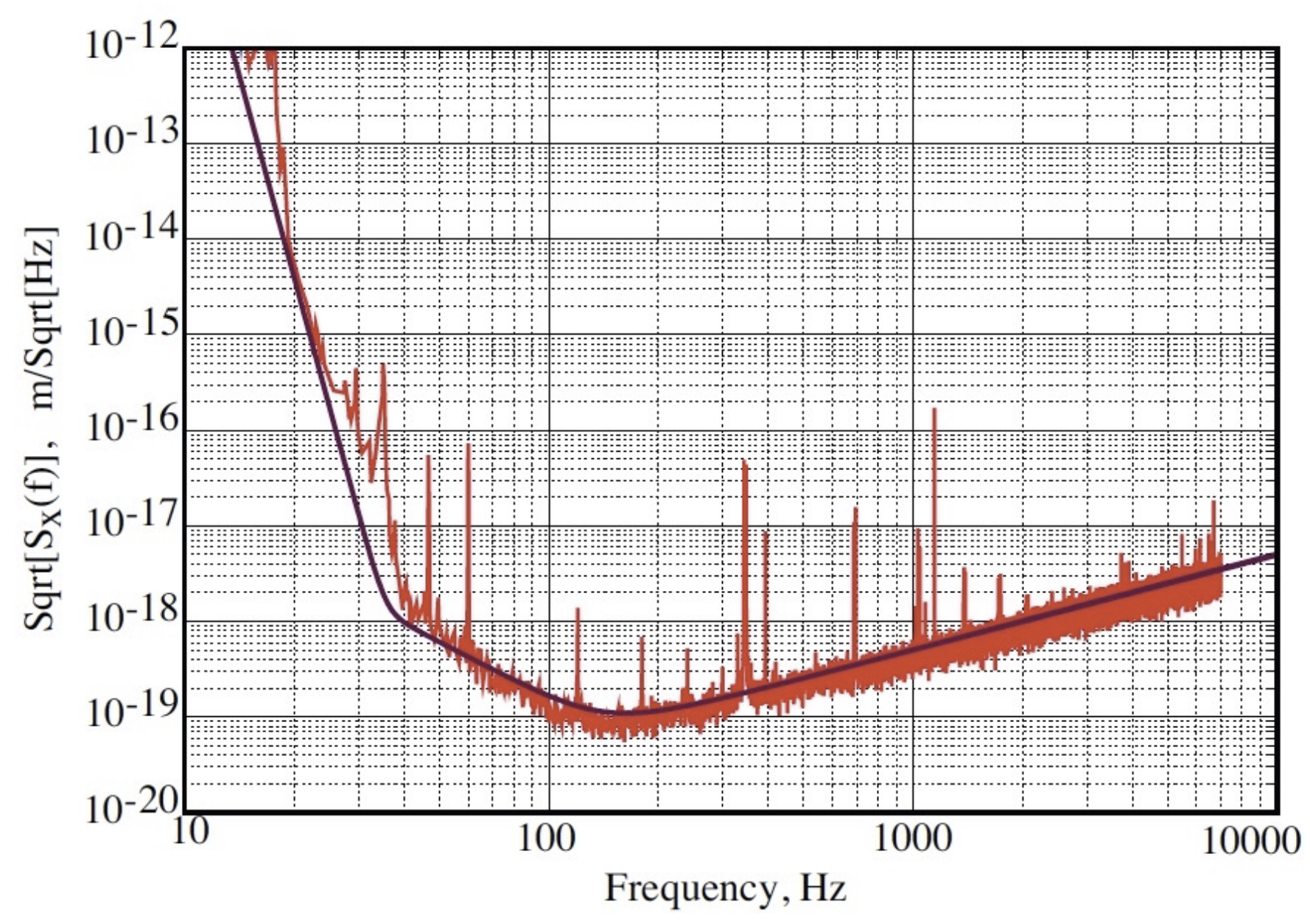 如图,LIGO 在 2007 年 3 月测量的探测器读出的双臂长度差 $x(t)$ 的谱密度。在 150Hz 以上,其主要贡献是光子到达时间的非均匀性引起散粒噪声;在 150Hz 和 40Hz 之间主要来源是镜子镀的膜的涨落引起的布朗噪声;在 40Hz 以下主要是地震噪声。图中的 y 轴画的是 $\sqrt{S_{x}(f)}$,其单位为 $m/\sqrt{\text{Hz}}$。如果 $x(t)$ 和 $y(t)$ 是两个随机过程,那么类似于 $S_{y}(f)$ 的定义,我们也可以定义 $S_{xy}(f)$ (交叉谱密度) $$ S_{xy}(f) = \lim_{T\to\infty} \frac{2}{T} \int_{-T/2}^{T/2} (x(t)-\bar{x}) e^{-i2\pi f t} dt \int_{-T/2}^{T/2} (y(t')-\bar{y}) e^{i2\pi f t'} dt' $$
如图,LIGO 在 2007 年 3 月测量的探测器读出的双臂长度差 $x(t)$ 的谱密度。在 150Hz 以上,其主要贡献是光子到达时间的非均匀性引起散粒噪声;在 150Hz 和 40Hz 之间主要来源是镜子镀的膜的涨落引起的布朗噪声;在 40Hz 以下主要是地震噪声。图中的 y 轴画的是 $\sqrt{S_{x}(f)}$,其单位为 $m/\sqrt{\text{Hz}}$。如果 $x(t)$ 和 $y(t)$ 是两个随机过程,那么类似于 $S_{y}(f)$ 的定义,我们也可以定义 $S_{xy}(f)$ (交叉谱密度) $$ S_{xy}(f) = \lim_{T\to\infty} \frac{2}{T} \int_{-T/2}^{T/2} (x(t)-\bar{x}) e^{-i2\pi f t} dt \int_{-T/2}^{T/2} (y(t')-\bar{y}) e^{i2\pi f t'} dt' $$ 显然
因此我们可以集中讨论正频率情况
描述了一个二维随机过程
类似的对于二维随机过程有
定理的证明可以参照 Kip Thorne 的讲义。有了以上关系,我们计算
让
类似的还有
直观上,我们来理解下谱密度
其中这个 "
定义
通常把观测窗口时长
日常生活中有
那么
其中
当每个
另一方面,如果
信噪比与匹配滤波
在实际的干涉仪测量中,我们测到的数据一般可以写作
其中
对于测量的
而我们的目的是选取合适的
而将其代入对应的
因此,对于给定波型,我们可以选取对应合适的滤波器使得期望的信号相对于期望的噪声达到最大。但实际情况中,我们虽然在理论中可以计算双黑洞和双中子星的波型
当选取的
参数估计
很明显由于噪声的影响,我们并不能唯一的从数据中确定真值
我们先定义两个波型的内积
对于每一个事件,都有一个真实的
考虑(频域)数据
如果
或者
定义等 式的右边
这个矩阵被称为 Fisher 信息矩阵,因此随机变量
而
因此对最佳拟合
可以看出 Fisher 信息矩阵的逆描述了测量误差的平方差。比如